
Das Prinzip der virtuellen Arbeit wird häufig verwendet, um unbekannte Lagerkräfte zu bestimmen. Zunächst müssen wir uns mit dem Begriff der Arbeit vertraut machen. Es besagt, dass bei einem sich in Ruhe befindlichen System die virtuelle Arbeit aller äußeren Kräfte und Momente verschwindet.
Für ein optimales Verständnis hilft dir ein anschauliches Rechenbeispiel zu dem Thema.
Mehr zu diesem Thema und der Statik findest du in unserem Onlinekurs TM1-Statik.
In dieser Lektion wollen wir uns das Prinzip der virtuellen Arbeit zur Berechnung von unbekannten Lagerkräften anschauen.
Begriff: Arbeit
Das Prinzip der virtuellen Arbeit wird häufig verwendet, um unbekannte Lagerkräfte zu bestimmen. Zunächst müssen wir uns mit dem Begriff der Arbeit vertraut machen.
Die Arbeit W ist damit das Produkt aus Kraft mal Weg:

Wir befinden uns im obigen Fall innerhalb der Dynamik (Teilgebiet Kinetik), weil wir einen bewegten Körper betrachten.
Beim Prinzip der virtuellen Arbeit gehen wir nun nicht von tatsächlichen Bewegungen bzw. Verschiebungen von Körpern aus, sondern von virtuellen – also gedachten – Verschiebungen.
Prinzip der virtuellen Arbeit: Voraussetzungen
Das Prinzip der virtuellen Arbeit basiert auf bestimmten Voraussetzungen, um korrekt angewendet werden zu können. Hier sind die wichtigsten Voraussetzungen:
-
Starre Körper: Das Prinzip der virtuellen Arbeit gilt typischerweise für starre Körper oder Systeme von starren Körpern. Starre Körper sind solche, deren Form und Größe sich unter Einwirkung von Kräften nicht verändern.
-
Statischer oder dynamischer Gleichgewichtszustand: Das System muss entweder in einem statischen Gleichgewichtszustand (wo die Summe aller Kräfte und Momente gleich null ist) oder in einem dynamischen Gleichgewichtszustand (wo sich die Bewegung nicht ändert, wenn die Summe aller Kräfte und Momente gleich null ist) sein.
-
Virtuelle Verschiebungen: Eine virtuelle Verschiebung ist eine gedachte, infinitesimale Verschiebung eines Systems von seiner Gleichgewichtslage ausgehend.
-
Reversible Verschiebungen: Reversible Verschiebungen sind Verschiebungen in einem mechanischen System, bei denen das System in seinen ursprünglichen Zustand zurückkehren kann, ohne dass dabei Energie verloren geht oder permanente Veränderungen auftreten.
-
Elastizitätsfreiheit: In den meisten Anwendungen des Prinzips der virtuellen Arbeit wird angenommen, dass das System elastizitätsfrei ist, d.h. dass es keine Verformungen aufgrund von Spannungen oder Verformungen gibt.
Wenn diese Voraussetzungen erfüllt sind, kann das Prinzip der virtuellen Arbeit angewendet werden, um Gleichgewichtsbedingungen in mechanischen Systemen zu analysieren und Lösungen für verschiedene statische oder dynamische Probleme zu finden.
Prinzip der virtuellen Arbeit: Formel
Betrachten wir nun Verschiebungen u statt des Wegs s, so erhalten wir den Arbeitssatz für Verschiebungen:

Hierbei ist dW die infinitesimale Arbeit die infolge der infinitesimalen Verschiebung du durch die Kraft F erfolgt. Wir ersetzen hier s durch u, weil wir allgemein nicht vom Weg s sondern von Verschiebungen u ausgehen.
Der Begriff >infinitesimal< bedeutet: ins unendlich Kleine gehend! Wir betrachten also sehr kleine, kaum merkbare Verschiebungen und damit Arbeiten. Das >d< vor den Buchstaben zeigt an, dass es sich um infinitesimale Verschiebungen und Arbeiten handelt.
Sind mehrere Kräfte gegeben, so müssen wir die Summe der einzelnen Arbeiten betrachten:

Da wir von virtuellen Verschiebungen ausgehen, die tatsächlich nicht gegeben sind, ist die verrichtete Arbeit tatsächlich nicht vorhanden und damit Null:

Schauen wir uns nun mal Schritt-für-Schritt an, wie das Prinzip der virtuellen Arbeit (auch: PdvA) angewendet wird, um eine unbekannte Auflagerkraft zu bestimmen.
Vorgehensweise: Prinzip der virtuellen Arbeit
Wir wollen mit dem folgenden Beispiel aufzeigen, wie das Prinzip der virtuellen Arbeiten angewendet wird, um eine unbekannte Auflagerkraft zu bestimmen.
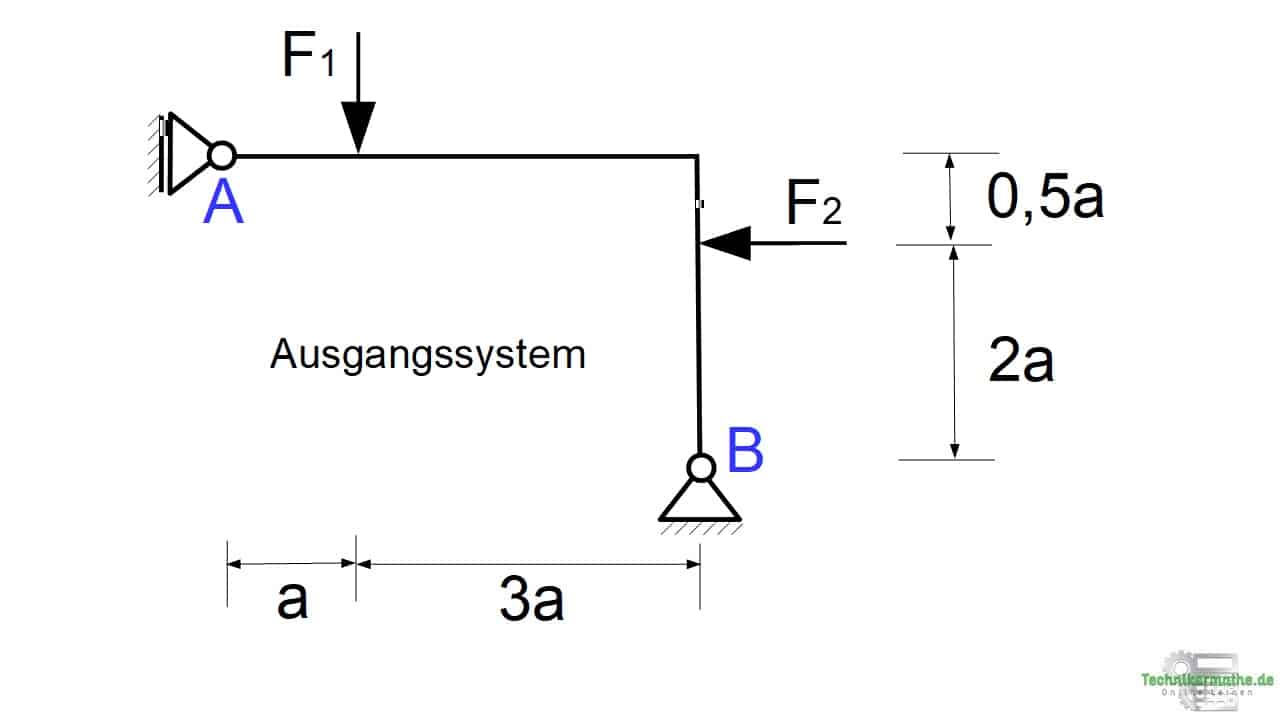
Gegeben sei das obige System, welches auf einem Loslager A und einem Festlager B gelagert ist. Die äußeren Kräfte betragen F1 = 12 kN und F2 = 8 kN.
Bestimme die Auflagerkraft Bh mittels Prinzip der virtuellen Arbeit.
Schritt 1: Gesuchte Auflagerkraft lösen
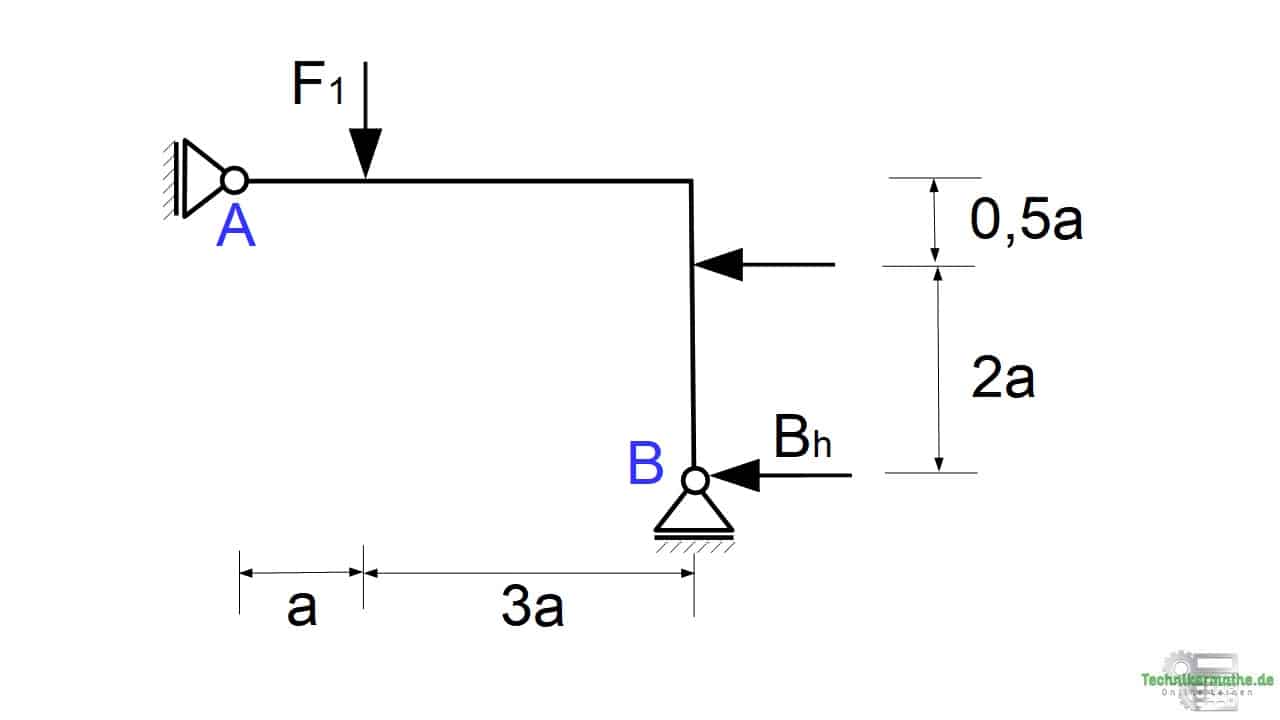
Um das Prinzip der virtuellen Arbeit auf statische Systeme anwenden zu können, müssen wir das gegebene statisch bestimmte System zunächst kinematisch also verschieblich machen, indem wir die gesuchte Auflagerreaktion entfernen und als äußere Kraft an das System anbringen.
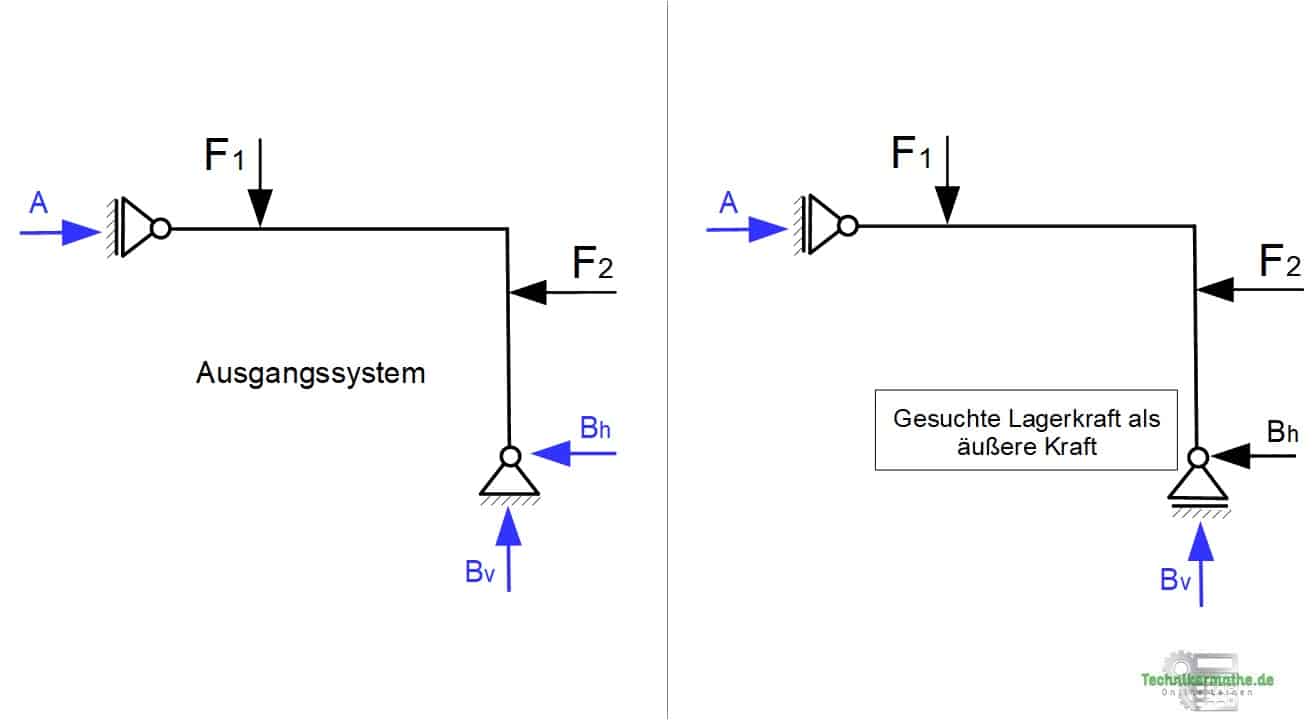
Gesucht wird die Auflagerkraft Bh mittels Prinzip der virtuellen Arbeit. Demnach müssen wir diese Lagerkraft aus dem System lösen und als äußere Kraft abtragen. Das gegebene Festlager müssen wir dann durch ein Lager ersetzen, welches dann keine vertikale Lagerkraft mehr übertragen darf. Dazu wählen wir ein Loslager, welches noch die vorhandene Lagerkraft Bv überträgt.
Schritt 2: Polplan aufstellen
Im nächsten Schritt muss der Polplan aufgestellt werden. Dazu wenden wir die Regeln des Polplans an (siehe Materialien).
Bei unserem System handelt es sich um eine Scheibe, weil dieses System fest verbunden ist. Es sind keine Gelenke gegeben, die zwei Systeme miteinander verbinden.
Damit gibt es hier nur einen Hauptpol und keinen Nebenpol. Wir müssen diesen Hauptpol zunächst finden.
Da wir zwei Loslager (=verschiebliche Lager) gegeben haben, können wir hier die Regel 3 anwenden.
Regel 3: Der Hauptpol (i) einer Scheibe, die auf einem verschieblichen Lager (z.B. Loslager) gelagert ist, liegt auf einer Geraden (Polstrahl) senkrecht zur Bewegungsmöglichkeit dieses Lagers.
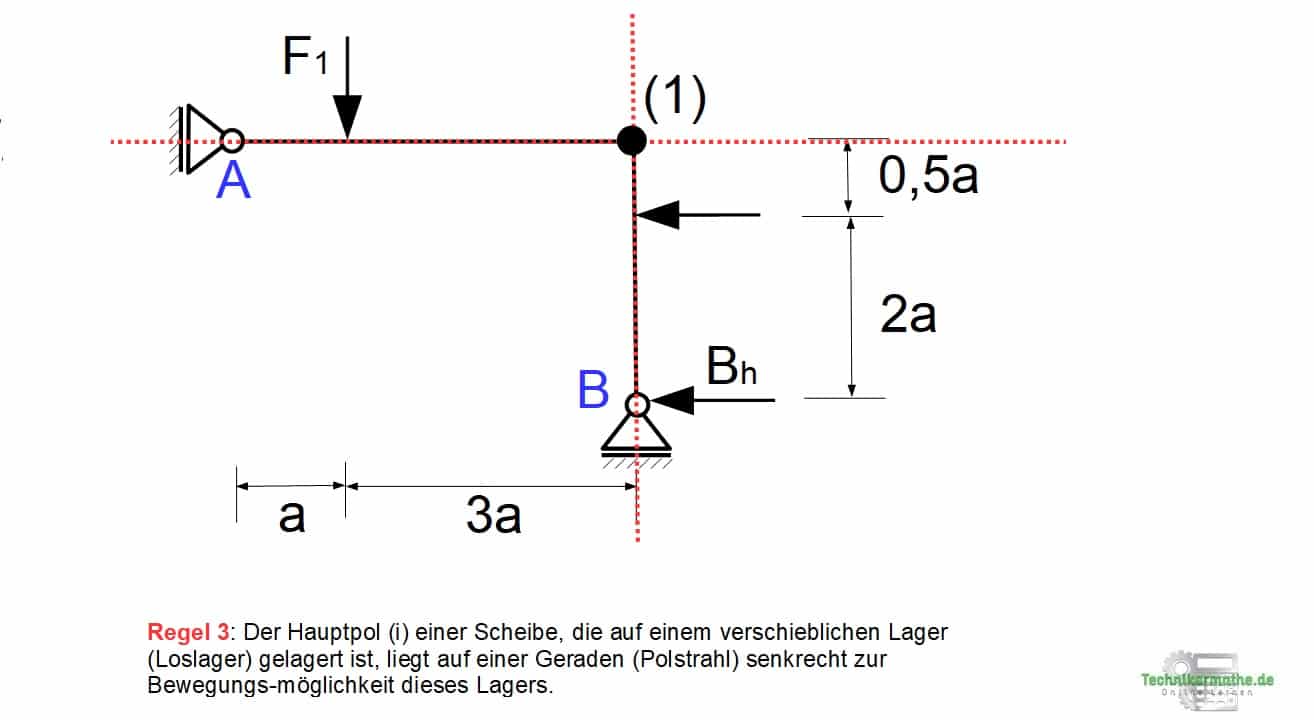
In der obigen Grafik ist der Hauptpol (1) der Scheibe im Schnittpunkt der beiden Polstrahlen gegeben. Denn für diesen Punkt gilt die Regel 3 für beide Loslager.
Schritt 3: Verschiebungsplan
Als nächstes betrachten wir den Verschiebungsplan, indem wir eine infinitesimale Drehung dφ um den Hauptpol vornehmen. Hier können wir nun entweder eine Drehung im oder entgegengesetzt zum Uhrzeigersinn wählen.
Der Begriff >infinitesimal< bedeutet >ins unendlich Kleine gehend<. Wir gehen hier also von sehr kleinen, kaum sichtbaren Drehungen und damit verbundenen Verschiebungen aus. Diese Drehungen und Verschiebungen sind zudem virtuell, also gedacht und dienen lediglich der Berechnung der Auflagerkräfte.
Wir wählen hier eine infinitesimale Drehung dφ im Uhrzeigersinn (Rechtsdrehung) um den Hauptpol (1):
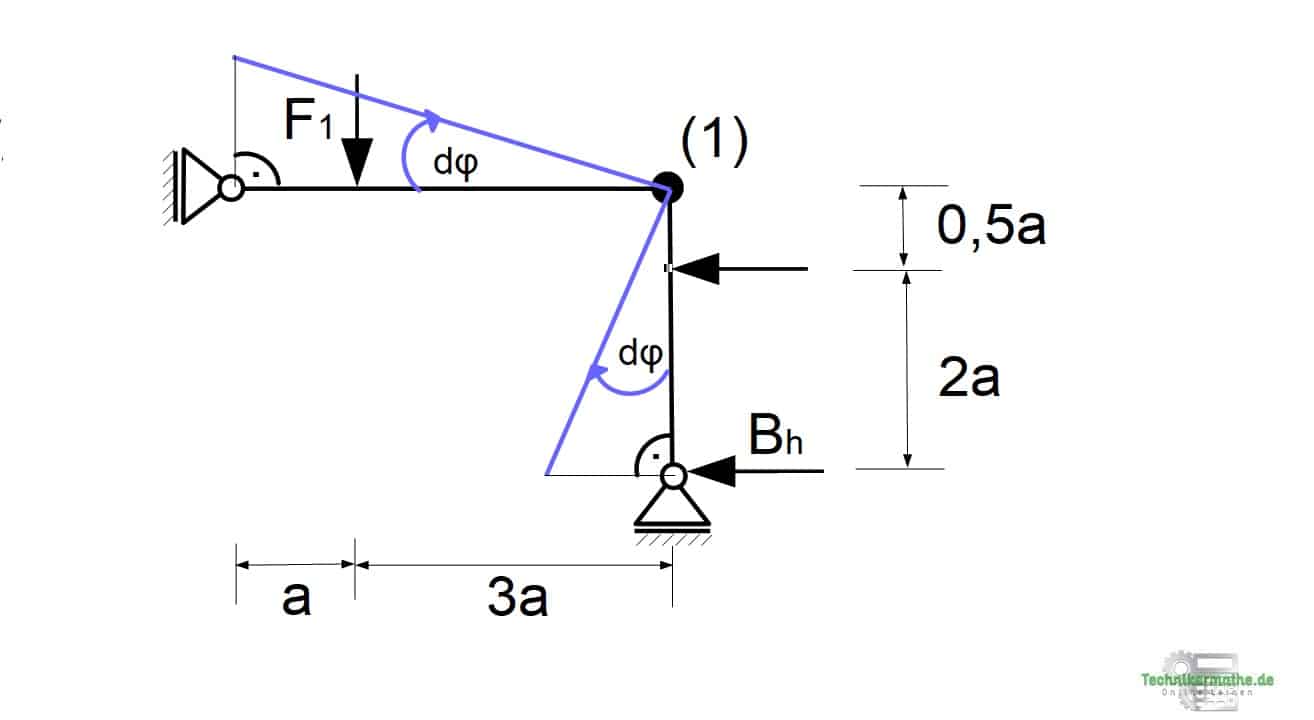
Durch die infinitesimale Drehung um den Hauptpol erfolgt eine Verschiebung der Endpunkte (hier: Auflager) in einem rechten Winkel zur Verbindungslinie zwischen Hauptpol und Endpunkt.
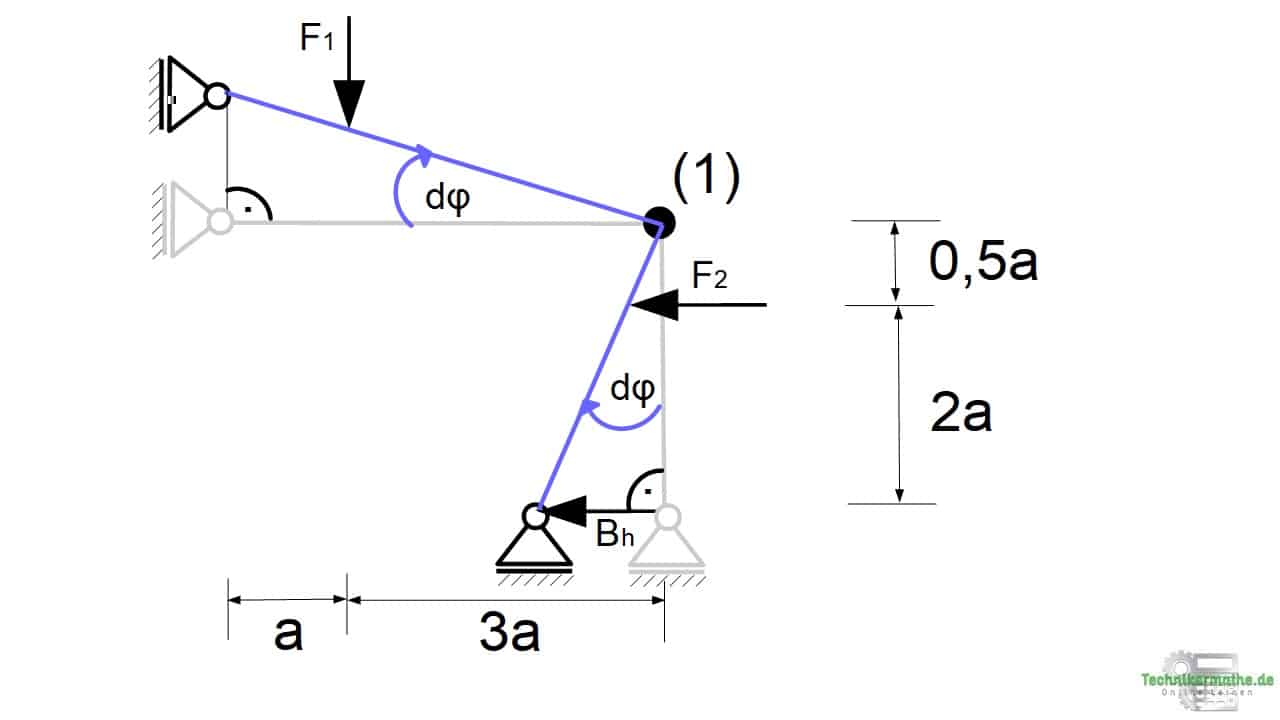
Das System verschiebt sich dann wie in der Grafik in blau angegeben. Dabei verschieben sich auch die Loslager sowie die Kräfte F1, F2 und Bh:
Wir wollen nun die aufgrund der virtuellen infinitesimalen Verdrehung dφ hervorgerufenen infinitesimalen Verschiebungen du der einzelnen Kräfte bestimmen. Dazu betrachten wir die rechtwinkligen Dreiecke und wenden den Tangens an (Trigonometrie am rechtwinkligen Dreieck):
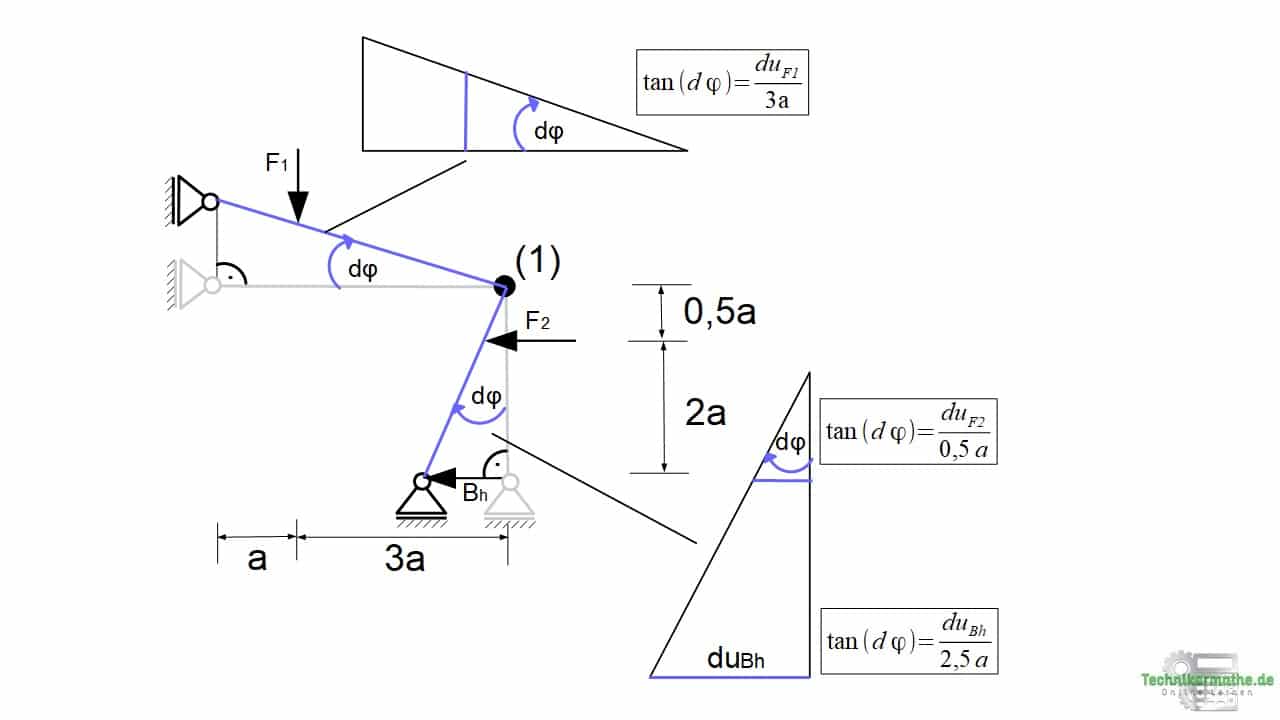
Wir gehen hier von infinitesimalen Verschiebungen aus, weshalb gilt:

Der Tangens des Winkels ist bei sehr kleinen Winkel gleich dem Winkel selbst.
Damit ergib sich:



Wir suchen die infinitesimale Verschiebung du der Kräfte infolge der infinitesimalen Drehung dφ um den Hauptpol und lösen die obigen Gleichungen nach der Verschiebung auf:
 Verschiebung der Kraft F1
Verschiebung der Kraft F1
 Verschiebung der Kraft F2
Verschiebung der Kraft F2
 Verschiebung der Kraft Bh
Verschiebung der Kraft Bh
Schritt 4: Arbeitssatz anwenden und Lagerkraft berechnen
Im nächsten Schritt wenden wir den Arbeitssatz an:

dW ist hierbei die Summe der infinitesimale Arbeit, die von den Kräfte auf ihren infinitesimalen Verschiebungen du verrichtet wird.
Diese infinitesimale Arbeit dW setzen wir gleich Null, weil tatsächlich im System keine Verschiebungen stattfinden dürfen. Diese haben wir nur herbeigeführt, indem wir die Auflagerkraft Bh entfernt und als äußere Kraft abgetragen haben. Mit der Bedingung, dass nun die Arbeit null sein muss, können wir diese unbekannte Kraft Bh berechnen.
Die Verschiebungen hatten wir berechnet zu:
Verschiebung der Kraft F1
Verschiebung der Kraft F2
Verschiebung der Kraft Bh
Einsetzen der Verschiebungen in den Arbeitssatz:

Die Arbeit, welche die Kraft F1 verrichtet ist negativ, weil die Kraft F1 entgegengesetzt zur Verschiebung gerichtet ist. Die Verschiebung erfolgt vertikal nach oben, die Kraft F1 ist aber vertikal nach unten gerichtet.
Die Arbeiten, welche die Kräfte F2 und Bh verrichten sind positiv, weil die Kräfte und die Verschiebung gleich gerichtet sind.
Wir lösen nun die obige Gleichungen Schritt-für-Schritt nach der gesuchten Lagerkraft Bh auf:
 |
|

 |
|

Einsetzen der Zahlenwerte (F1 = 12 kN, F2 = 8 kN):

Die Auflagerkraft Bh beträgt 12,7 kN.
Was gibt es noch bei uns?
Optimaler Lernerfolg durch tausende Übungsaufgaben

Quizfrage 1
“Wusstest du, dass unter jedem Kursabschnitt eine Vielzahl von verschiedenen interaktiven Übungsaufgaben bereitsteht, mit denen du deinen aktuellen Wissensstand überprüfen kannst?”

Was ist Technikermathe?
Unser Dozent Jan erklärt es dir in nur 2 Minuten!
Oder direkt den > kostenlosen Probekurs < durchstöbern? – Hier findest du Auszüge aus Alle Onlinekurse Technikermathe!
Geballtes Wissen in derzeit 26 Kursen
Hat dir dieses Thema gefallen? – Ja? – Dann schaue dir auch gleich die anderen Themen zu den Kursen
WT3 (Werkstoffprüfung) und
TM1 (Technische Mechanik – Statik) an.
Perfekte Prüfungsvorbereitung für nur 14,90 EUR/Jahr pro Kurs
++ Günstiger geht’s nicht!! ++
Oder direkt Mitglied werden und Alle unsere Onlinekurse (inkl. Webinare + Unterlagen) sichern ab 7,40 EUR/Monat ++ Besser geht’s nicht!! ++
Social Media? - Sind wir dabei!



Dein Technikermathe.de-Team

